2021年3月,德国罗斯托克大学的大城市航道上的自主电力航运(A-SWARM)项目在德国波茨坦研究所(SVA)进行了首次测试。该项目将用于基于自主电力船舶的现代城市物流项目,这些电力船舶可以组合在一起形成一艘大型船舶。重点是开发自主表面艇。这些演示装置可以单独运行,也可以同时运行。
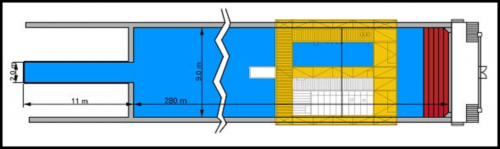 拖曳水池图纸
拖曳水池图纸

2个可旋转RIM驱动器
其中一个船模配备了两个360°可旋转的5千瓦内联推进器(RIM驱动器)。姿态测量是在室内进行的,测量车上安装了Qualisys运动捕捉系统。
 实验中使用Qualisys运动捕捉系统进行姿态测量
实验中使用Qualisys运动捕捉系统进行姿态测量
设备配置
✔ 6个 Qualisys Oqus 3+ 摄像机
✔ 2个 Qualisys Oqus 5+ 摄像机
该测试用于识别船模的运动模型和参数化控制系统,从而实现灵活和精确的速度和姿态控制。运动模型还作为非线性卡尔曼滤波器的基础,该滤波器除了基于模型的速度估计外,还可以估计电流和风力。此外,还研究了不同运行模式下的定位、滤波器和控制器结构的效率和性能。

自动跟踪(纵向)

自动跟踪(横向)
此次测试的目标是在有限的环境下对运载工具的精确操纵,以及控制系统对电流和风等干扰的快速补偿。这些目标都已达成,下一步将集成典型的导航传感器,以便在野外操作运载工具。
注:本文内容来源于 https://youtu.be/QKKd25B7KJU
Qualisys Arqus摄像机 (陆上)
在不同海浪、潮流和风力条件下捕捉船舶运动是流体力学实验室或海军试验场的基本任务。在这一领域,Qualisys拥有同时在水上水下进行大空间的物体运动捕捉的技术。我们开创性地将水上摄像机和水下摄像机相结合,也即“双系统”设置,将两者合为一个运动捕捉系统,能同时采集物体在水上、水面、水下的数据。
 Qualisys Miqus Unerwater 摄像机 (水下)
Qualisys Miqus Unerwater 摄像机 (水下)
在测试时,光学运动捕捉系统不需要连接到船舶。镜头通过船舶上轻量标记点追踪船舶的6DOF位置和方向。位置上的精度可以低至1mm,旋转角度的精度低至0.1°,根据空间大小而有所不同。Qualisys 能将刚体数据实时流传输到外部应用程序,便于不同研发需要。