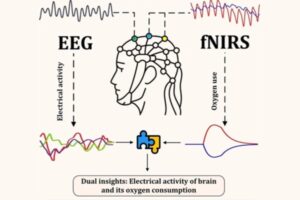
本次在线研讨会我们邀请到瑞典查尔姆斯理工大学终身教授陈芳博士所带领的爱乐克团队成员王韵超工程师带来以“紧急交通干扰场景下驾驶员行为反应测试”为主题的研究分享,内容包括实验方案、实验步骤以及技术路线的制定等,该研究由爱乐克智能科技有限公司主导完成,其目的得到中国驾驶员在各类交通干扰场景下的相关参数,从而定义和建模适用于交通干扰的专业且谨慎的驾驶性能模型。
01 研究背景
关于协调国际自动驾驶法规的WP29文件写道:“自动驾驶车辆不得造成任何不可容忍的风险,这意味着在其运行范围内,不得造成任何可合理预见和预防的导致伤亡的交通事故。”(UN/WP292019,WP29-177-19,自动化/自动驾驶汽车框架文件)。
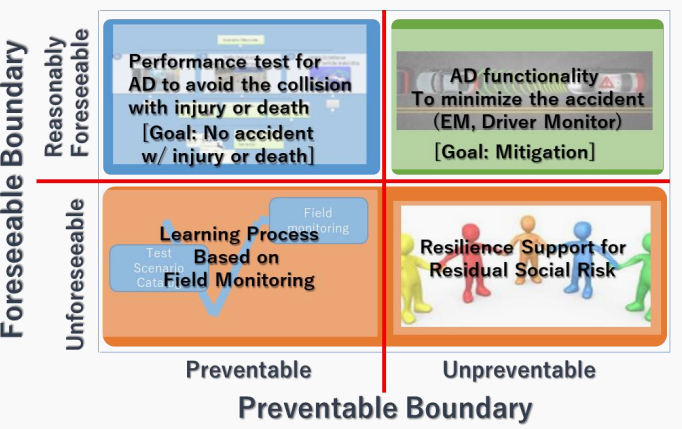
驾驶过程中的主要安全风险是与周围的交通参与者或障碍物碰撞,这是通过交通干扰场景系统化的。即通过为这些交通干扰场景中的每一个定义合理的可预见性和可预防性的量化范围,定义了与每个测试相关的定量标准。基于这些与交通相关的危险场景,可以扩大评估范围,将感知和车辆稳定性相关的危险情景纳入评估,从而进行全面的安全评估。
交通干扰是指存在于自车周围的交通参与者的位置和行为阻碍自车的安全驾驶。安全原则背后的基本思想是:“在可预见的范围内,为自动驾驶系统配备比称职谨慎的人类驾驶员更高水平的规避性能。”因此,需要定义和建模适用于交通干扰的专业且谨慎的驾驶性能模型。通过在模拟程序中实现这个定义的模型,得出一个专业且谨慎的人类驾驶员可以避免碰撞的实际范围,就有可能定义与交通干扰有关的安全标准。
02 会议信息
会议主题与内容
主题:紧急交通干扰场景下驾驶员行为反应测试
内容:
- 研究方案
- 实验步骤
- 技术路线
直播时间
2023年4月27日(星期四) 15:00
报名参会
您可以点击此报名链接或长按识别下方二维码免费报名参会