采用驾驶模拟器、交通场景仿真软件SILAB、DG3眼镜式眼动仪、PhysioLAB生理仪、HRT驾驶行为分析系统等设备,搭建了六车道高速公路下的前方空旷、前方车辆追尾、前方车辆换道三种典型人机共驾接管环境,获取驾驶人全过程眼动生理特征、车辆运行数据、被试驾驶任务需求主观评价数据,并对数据进行预处理。
2.分析比较人机共驾环境下的驾驶人接管行为特性。
对人机共驾环境下的接管与传统驾驶两种驾驶模式下的驾驶人驾驶特性进行比较分析,基于方差分析法分析各因素与驾驶风险间的显著关系。 研究表示,方向盘转角值、刹车踏板踩下程度、油门踏板
踩下程度、注视时长、扫视时长、扫视幅度、瞳孔面积等数据与驾驶风险具有较强相关性。
3.分析人机共驾环境下的驾驶人接管风险。
由于常规的驾驶风险判别指标数据获取来源难度较大,本文提出从车辆操纵、眼动表征和任务需求三个维度综合评估驾驶人接管风险。
标配三联屏的视景显示方案,提供高分辨率的前景及后视镜画面显示;以及物理液晶屏方案实现仪表及中控屏交互,中控屏支持触摸交互,搭配5.1环绕音响系统实现驾驶模拟声音仿真,输出发动机噪声、风噪、交通环境音、交互提示音等声音。

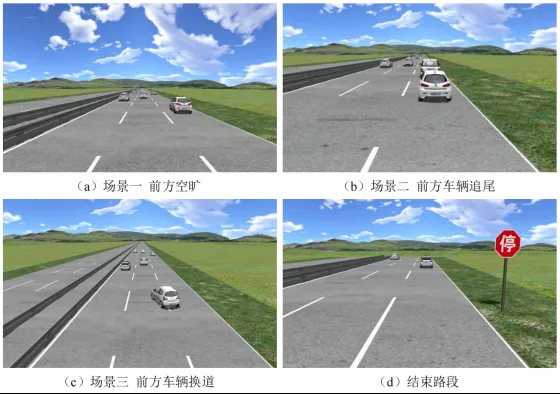
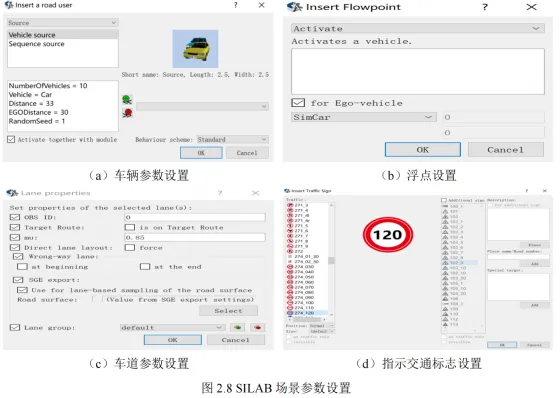
本文主要利用SILABAEdit编辑器对实验中设置的接管场景进行编辑,以浮点形式触发车辆,当实验车辆行驶到指定位置,就会自动发该浮点,确保被试者在同一地点遇到的动态场景相同,减少实验随机性。




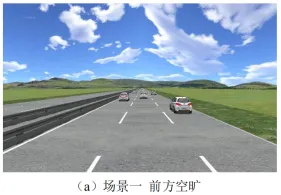
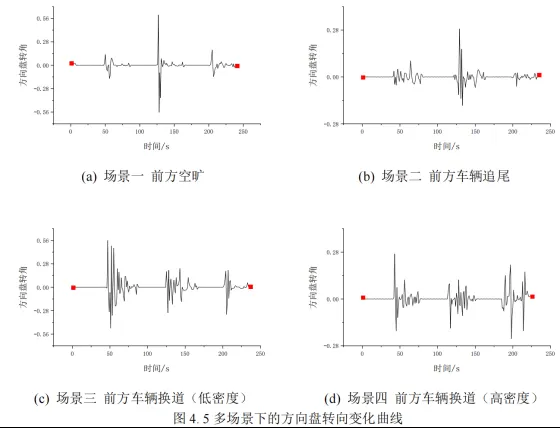
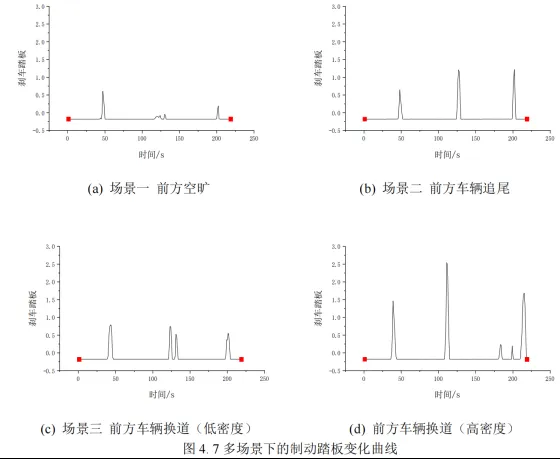
- 前方空旷:模拟车辆在正常行驶中突然遇到前方无车情况,需要驾驶人接管车辆控制。
- 前方车辆追尾:模拟前方车辆突然减速或停车,导致可能追尾的情况,要求驾驶人接管并避免碰撞。
- 前方车辆换道:模拟前方车辆突然换道,驾驶人需接管并作出相应避让。
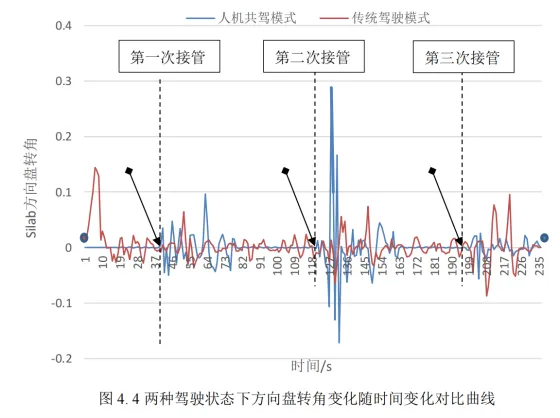
其中场景一(前方道路空旷)分为三段,分别为0-2000m、2000-4000m、4000-6000m。第一次驾驶接管请求发生在 1000m 处、第二次驾驶接管请求发生在 3000m 处,第三次驾驶接管请求发生在 5000m 处。实验中设置自动驾驶速度为 100km/h。
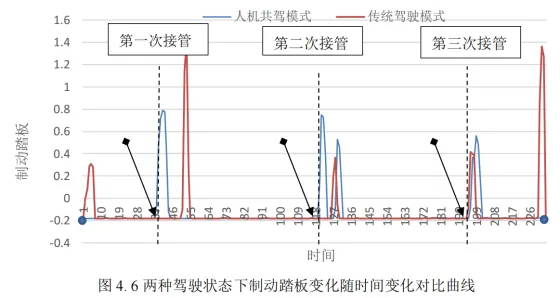
1.车辆自动驾驶直至1000m处,发出声音提示“请接管车辆”(音频时长共计 3s,音量设置为 0.8),要求被试者执行接管车辆的操作。被试者通过临场反应与观察周边情况,随即通过转动方向盘、踩下制动刹车等干预操作获得车辆的控制权。当被试者完全接管车辆,进入手动驾驶状态稳定行驶直至指示牌处,路段一的接管实验结束。
2.车辆恢复自动驾驶直至3000m处,发出声音提示“请接管车辆”,其余同(1)。
3.车辆恢复自动驾驶直至5000m处,发出声音提示“请接管车辆”,其余同(1)。
结束驾驶后,驾驶人完成NASA-TLX量表、主观评价表、实验满意度调查。
注:对照实验为全过程手动驾驶,仍在指定时间内发出语音提示。
场景二为前方 150m 处发生追尾冲突,并发出语音提示“请接管车辆”。场景三为前方 150m 处发生有车辆换道至本车道(“别车”),并在发出语音提示“请接管车辆”。其余同场景一,此处不再赘述。
- 道路类型:高速公路、双向六车道(有中央分隔带)
- 道路宽度:车道宽3.75km,紧急停车带3.5m
- 道路长度:大于1000km
- 道路纵坡:0
- 道路限速:60~120km/h
- 自动驾驶车速:100km/h
- 自然气候:天气晴、白天、无风
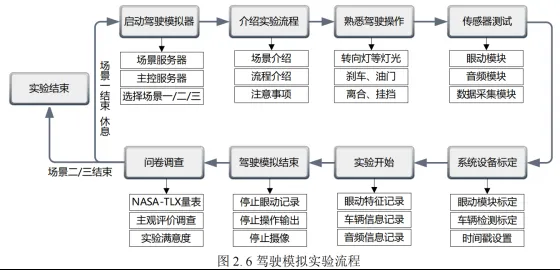
确保所有设备连接正常,数据采集系统准备就绪。
解释实验流程和注意事项,确保驾驶人理解实验目的和要求。
驾驶人上车,佩戴好所有测试设备,开始实验。
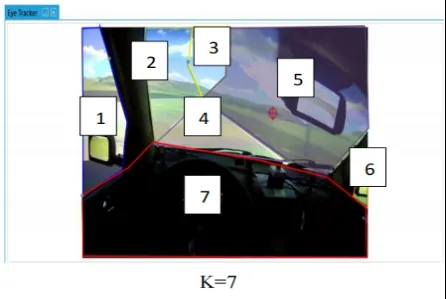
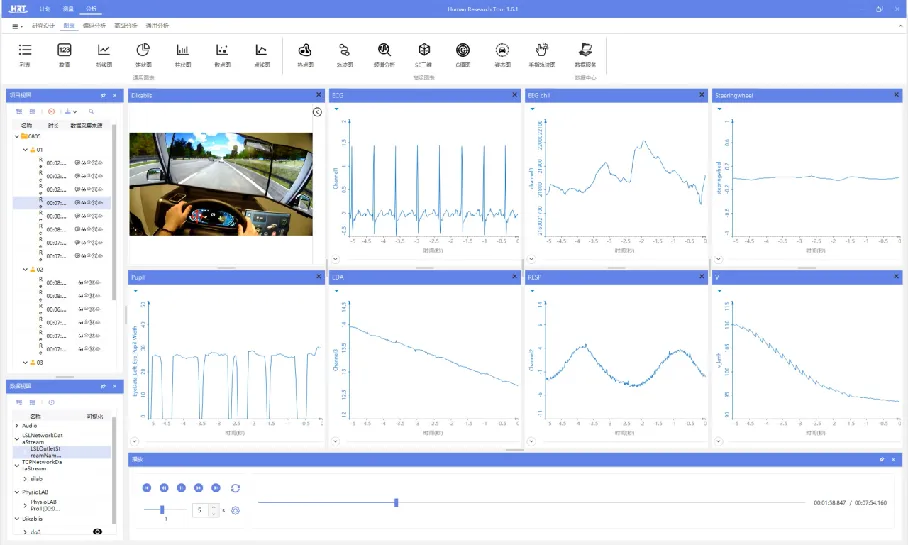
通过眼动仪记录驾驶人的注视时长、扫视时长、扫视幅度和瞳孔面积。
使用PhysioLAB生理仪和NE脑电仪实时采集驾驶人的皮电、心电和脑电数据。
记录驾驶人的主观感受和任务需求评价数据。
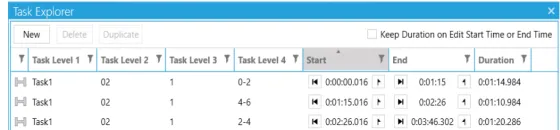
时间维度进行任务段划分,标定接管提示时间。
针对人机共驾模式和传统驾驶模式的眼动生理数据、车辆运行状态数据进行对比分析,每名被试在每个实验场景下共有 2 段数据记录,共计三个实验场景,六段数据记录。
- 方向盘转角值:分析接管过程中方向盘的转动角度,评估驾驶人的方向控制能力。
- 刹车踏板踩下程度与油门踏板踩下程度:分析驾驶人在接管过程中的加速和减速行为,评估其速度控制能力。
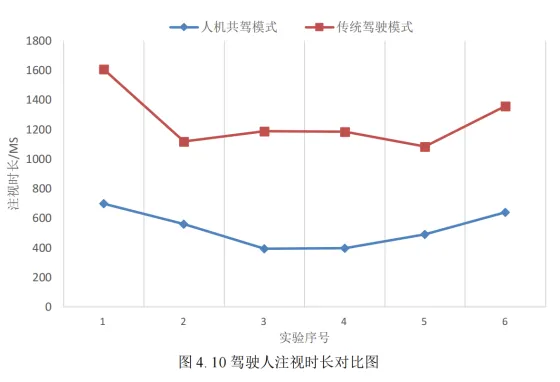
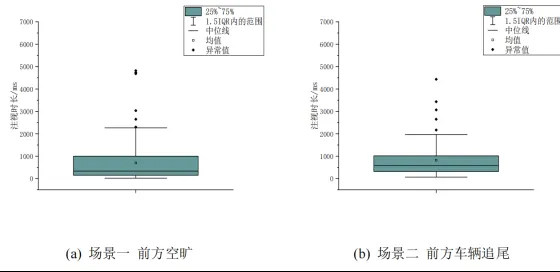
- 注视时长:分析驾驶人在接管过程中对关键区域的注视时间,评估其注意力分配情况。
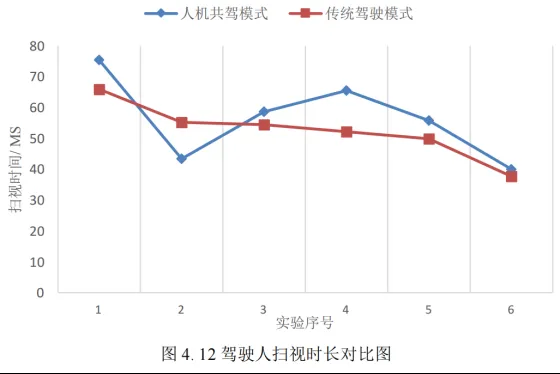
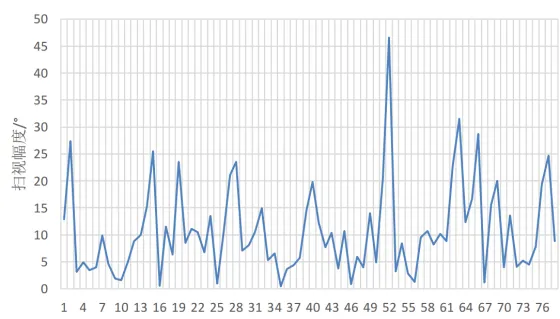
- 扫视时长与扫视幅度:分析驾驶人的眼球移动速度和范围,评估其视觉搜索效率。
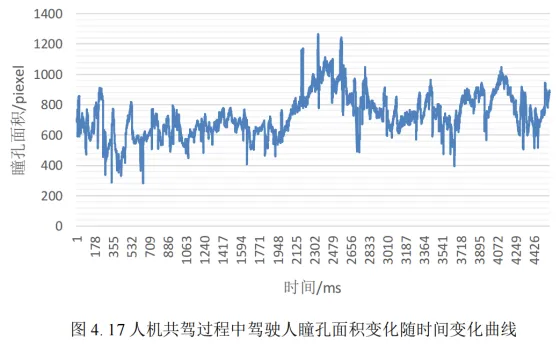
- 瞳孔面积:作为生理指标之一,分析驾驶人在不同接管情境下的应激反应。
- 基于多资源理论中的多通道理论,建立适用于典型人机共驾环境下的待接管驾驶任务需求评估模型,量化接管全过程的驾驶任务需求。通过主客观综合验证,确保模型的可信度。
- 皮电(GSR):反映驾驶人的心理应激水平,高皮电值通常与紧张、焦虑等情绪相关。
- 心电(ECG):监测心率变异性,评估驾驶人的情绪状态和心血管反应,如心率加速可能表示紧张或压力增加。
- 呼吸(RESP):通过呼吸频率和幅度反应人的情绪状态的变化。
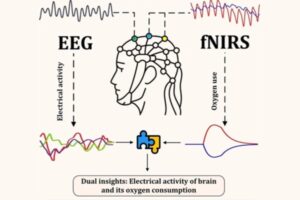
- 脑电(EEG):通过脑电信号分析驾驶人的认知负荷和注意力状态,如α波减少、β波增加可能表示注意力集中或认知负荷增加。



2.分析心电(ECG)数据,提取心率变异性(HRV)等指标,评估驾驶人的心理负荷。
3.展示脑电(EEG)数据,分析驾驶人在接管过程中的注意力水平和认知负荷。
在数据相关性分析中,进一步佐证了上述发现与分析,几种特性参数与车辆运行参数 TTC 有显著相关性。综上选定方向盘转角、刹车踏板、油门踏板、注视时间、扫视时间、扫视幅度、瞳孔面积几种类型的驾驶特性来描述驾驶接管行为,与接管绩效建立相应的数学关系模型,进行多指标组合来提高判定精度。
本实验通过构建人机共驾仿真环境,深入分析了驾驶人在接管过程中的行为特征及潜在风险,为提升自动驾驶系统的安全性和效率提供了有力支持。未来研究可进一步细化接管场景、扩大样本量、优化风险评估模型,以推动人机共驾技术的持续发展。