△水下蛇形机器人
其中光学运动捕捉范围广且捕捉对象空间位置关系明确,精度高误差小,并且基于光学动作捕捉的数据驱动的智能体可以生成高度协同的动作,能够在和物理模拟结合时提供对物理干扰、环境变化和形态差异的自然过程响应,使其适用于机器人领域的许多场景,包括无人集群系统,还有外骨骼机器人、仿生机器人、机械臂等领域。

并且随着运动捕捉技术的不断创新,更多应用于特定研究场景的运动捕捉系统得到了发展,如水下光学运动捕捉系统在海洋和水下机器人研究中有着强大的应用潜力。
水下光学运动捕捉系统的诞生,为实现水下机器人的运动轨迹、空间位置、活动范围精准测试以及三维模型建立,实时监测水下机器人的运动能力、运动方式和运动规律提供了强大的数据支撑,同时也便于设计人员对水下机器人运动能力、运动方式、控制效果的直观判断。
来自土伦大学的机器人专家和计算机视觉研究人员便使用Qualisys光学三维运动捕捉开展了一系列水下机器人研究课题。
通过自主航行控制、导航定位通信、能源动力推进、目标探测识别、机械手作业等高新技术的不断突破,水下机器人将有效推动在海洋环境观测、深海资源探测和开发、深渊和极地的科学考察等领域的应用。

第一个主题涉及海洋,两栖和陆地机器人(RMMAT),尤其是机器人系统在水下和陆地环境中的移动性和自主性。

第二个主题集中在可持续机械系统(EOSMD)的生态设计和优化上,重点是复杂系统的优化方法。
 △ 5 x Qualisys Miqus Underwater
△ 5 x Qualisys Miqus Underwater
RMMAT(Marine, Amphibious and Land Mobile Robotics)轴的科学目标涉及机器人系统在水下和陆地环境中的移动性和自主性的发展。RMMAT能够进行一定的运动自主性并能够与人交互。

√ 双峰/多式联运
√ 交互式船舶交通
√ 水面船舶移动性
√ 提高陆地流动性
Qualisys三维运动捕捉系统可以对物体进行无接触式追踪,摄像机通过物体上轻量标记点追踪物体的6DOF位置和方向,COSMER实验室的研究人员使用Qualisys进行了以下方面的创新研究:
- 海洋和陆地移动机器人的机电一体化设计(船体,运动学,机械/机电一体化结构,机动化,推进/稳定/转向组件)
- 海洋和两栖机器人的控制指挥技术的充分性(维护稳定性,动态运动,控制质量和推力中心,行为转换,障碍物,可穿越性等)
- 感知系统,传感器参考控制,适应环境的人机界面(传感器仪器,感官包络,计量,数据融合,定位,鲁棒状态估计,控制,安全性)
此类机器人的应用目标是海洋和沿海环境中的勘探,监视,干预和救援。
EOSMD包括两个研究领域的活动:
√ 机械系统生态设计
√ 可持续复杂系统的优化
Qualisys运动捕捉系统在COSMER实验室的另一个应用是与赫罗纳大学Robòtica Submarina研究中心(CIRS)的合作项目。目标是使用CIRS的机器人和基础设施来测试COSMER开发的算法,该算法基于Qualisys运动跟踪系统定义的地面事实进行动态运动跟踪。
研究人员在一周内采集了近300个序列,并进行了6组不同的实验:
-
水下机器人流体动力学参数的估计(Mathieu Richier) -
智能卷轴的开发(Ornella Tortorici和Cédrice Anthierens) -
用于控制机器人绳索的脐带形状的视觉估计(Juliette Drupt和Claire Dune) -
潜水员位置的声学估计(Bilal Ghader和Claire Dune) -
识别潜水员的手势(Bilal Ghader和Claire Dune) -
创建水下SLAM数据库(Clémentin Boittiaux和Claire Dune)
(您可以点击文末阅读原文,了解有关实验的更多信息。)
除此之外,研究人员还特别关注了无人机和潜水员之间的相互作用,这涉及以下几个研究方向:
- 机器人和潜水员的状态估计;
- 通过视觉/声学数据融合对潜水员的检测和跟踪;
- 手势/信号的识别以及潜水员潜水中AUV的控制;
运动捕捉系统被放置在水下用以潜水员的自主监测,并揭示与之相关问题的运动状态。

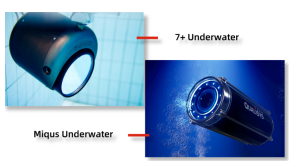
Qualisys水下镜头装备防水外罩,并配有专为水下使用而设计的闪光灯。每个镜头都经过5Bar(40m)水压测试。与Qualisys其它动作捕捉系统一样能同步外接硬件。
同时,分析软件Qualisys Track Manager功能强大,能够将3D和6DOP实时流传输到第三方应用程序中。
Qualisys还开创性地将水上摄像机和水下摄像机相结合,也即“双系统”设置,将两者合为一个运动捕捉系统,同时采集和输出数据。在水上和水下系统中添加同步和校准的视频摄像机,通过在图像上叠加3D和6DOF数据,更直观看到物体运动。

Qualisys运动捕捉系统具有室内室外、甚至水下的高精度定位能力,能够为各种类型的机器人提供详细的空间位置信息,常用于算法验证、运动规划、人机交互、轨迹回放、步态分析、智慧沙盘等机器人研究。
如需获取相关解决方案,欢迎致电4006-111-556详询!