Qualisys开发的室内、室外、水下3D动作捕捉系统,应用于机器人、船舶和自动驾驶的6DOF追踪、人机功效等工业领域。
近海力学与极区工程
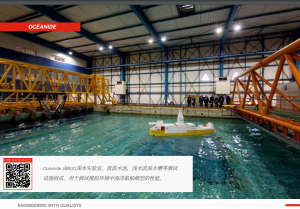
法国的滨海拉塞恩Océanide模拟水中环境和其它诸如海洋再生能源转换器、石油天然气平台、航运船舶、海底地形、水下管道等影响因素,观察船舶的性能。
2018年海洋、近海与极区工程国际会议上发表了一篇关于实验和计算流体动力学(CFD)方法的行业标准的论文,其使用了Qualisys动作捕捉系统追踪船舶模型、测量其在特定环境中的性能。
该研究涉及线管和线接管几何形状涡激振动(VIV)的分析,在使用传统工程工具进行分析时会存在一些已知的问题。
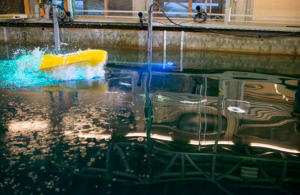
基于CFD的流固耦合(FSI)是一种很有希望的工具,可以替代现有的不能很好适应结构的工具。为了证明FSI方法的可实施性,在Océanide的BGOFIRST深水实验室中进行实验。这个水槽16m宽、40m长,可移动底板,水深可在几厘米到5m之间调节。
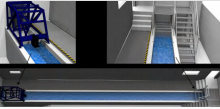
波浪水池
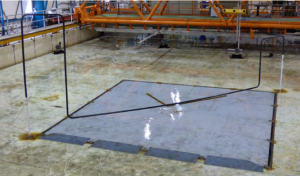
BGO FIRST 水槽
研究人员使用4台Qualisys水下镜头测量锚点的位置以确定位移离。Qualisys系统捕捉固定于模型上的6个标记点的位置和模型下游和尾流之外的水流速度,形成可靠性评估的数据工具的大型实验数据库。
该项目得出结论,实验研究是对数值模拟的补充,当仔细精确地执行时,它们可以作为基于CFD的FSI分析方法验证的宝贵资源。
机器人探索空间——密歇根大学
M-Air具有一个15m高、930m²的动作捕捉空间。这个空间里有32台Qualisys 7+IP67摄像机,能够让团队在户外和极端天气条件下学习。在室外,该团队可以在更真实的环境中进行算法验证,比室内模拟的环境更真实。比如,多风条件下进行四轴飞行器和地面机器人的研究测试,在真实的空间和地面环境中进行测试。

M-Air的研究还涉及弹性算法,可保护多自主体系统的安全性。他们研究的算法可让机器人实现特定目标,即使其中一些机器人被黑客攻击、出现故障或损坏。从控制理论的角度来看,这个方向可以从不同的角度来探讨。
其中一个实验,分析了运行在机器人上的状态评估器(辅助触点不变的扩展卡尔曼滤波器)的精确度。M-Air的动作捕捉系统用于采集地面实况数据。当被测物行走时,利用IMU、关节编码器和接触式测量(contact measurements)来估算机器人的3D方位、位置和速度,并附上几张图,用以比较状态评估器的数据和M-Air动作捕捉系统采集到的实际数据。

另一个正在进行的实验室,使用多轴飞行器进行有效载荷的协同运输,更确切地说,是使用带钉枪的八旋翼无人机去搭建屋顶。

“M-Air的最大好处是机器人可以在宽阔的户外空间运行。M-Air巨大的空间让我们可以进行更长时间的实验,不用担心机器人离开动作捕捉系统覆盖的区域。”——密歇根大学 博士 Ross Hartley
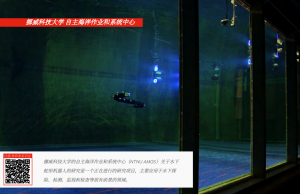
水下机器人——挪威科技大学自主海洋作业和系统中心
挪威科技大学自主海洋作业和系统中心(NTNU AMOS)团队为改善现代化水下交通工具的效率和可操纵性带来的光明前景,实现了检查海底石油和天然气装置的可能性。为验证理论研究结果,利用水下蛇机器人Mamba进行了理论研究和实验研究。
此外,获得了针对不同路径跟随控制方法的实验结果,并且验证了控制策略可以成功地使机器人朝着期望路径前进。为了使操纵机器人在未来成为现实,需要进行一些与控制相关的研究任务。

该研究团队从事蛇形机器人已经超过10年,现在正在使用最新的机器人Mamba进行水下实验。
采用Qualisys 系统(水下镜头)来捕捉机器人的动作。同时,他们使用Qualisys插件LabVIEW实时输出功能,将水下镜头捕捉的位置反馈到控制器,从而关闭控制回路。
系统配置
- 8个7+水下摄像机
- Qualisys Track Manager软件和LabVIEW插件
“在我们的实验中,安装在MC-lab或水槽中的 Qualisys系统结合反光标记点提供了机器
人位置和方向的实时精确数据。”——NTNU AMOS VISTA 研究员Eleni Kelasidi
海洋研究和开发——挪威科技工业研究院
在设计和操作船舶时,舒适性、高度规律性和安全性一直是最优先考虑的问题。挪威科技工业研究院(SINTEF)是欧洲最大的独立研究机构之一,为海洋技术公司提供研究、开发和以研究为基础的海事部门咨询服务。SINTEF还为海上石油生产和可再生能源的航运和海洋装备行业提供开发和验证技术解决方案。
该院实验场地已经拥有超过25年的测试经验,测试范围广泛,模型比例从1/40到1/150,水深从30m到1200m。
海洋实验室80x50x10m:27个 Qualisys 7+ 摄像机蛇形造波机
拖曳水池 260x10x10m:12个 Qualisys 7+ 摄像机
船舶技术
船舶技术部为航运业提供相关研究服务,例如船体外形设计、阻力和推进、耐波性、操纵装置和推进器的研究。已经有超过3000艘船模型在拖曳水池中建造和测试。
自1939年以来,通过更安全的设计,节省了数十亿美元的燃料成本和事故花费。

海洋流体动力学
船舶技术部不仅对系泊和DP-定位浮动开采系统、海上装卸系统和码头进行测试和调查,也参与所有涉及人为因素的海上作业、漂浮物、吊车作业、深水作业等。他们的任务包括操作性研究、验证以及风险和安全调查。

运动补偿——挪威运动实验室
作为SFI海上机电一体化项目的一部分,运动实验室进行的研究围绕着与船对船运动补偿相关的研究。在海上应用中,经常需要在两艘船之间、船和风力涡轮机(固定或浮动)之间转移负载,或将一件设备下放到海底。

通常情况下,这些操作需要技能娴熟的操作人员,他们能够平稳地控制甲板机械,不受海浪的干扰。
其目标是研究消除处置对象海上运动的各种方法,并开发一个框架,以帮助人类在恶劣的海上条件下尽可能安全和有效地执行有效载荷转移操作。
在实验过程中遇到的关键挑战之一是评估补偿精度,这是通过从计算处置对象的位置和方向的相对误差来确定的。运动实验室配备有动作捕捉系统,由17个Qualisys 7+摄像机组成,可以覆盖整个实验室空间,通过安装动作捕捉系统,可以立即获得关于转移载荷的完整6DOF信息。
其他实验包括:
- 主动升沉补偿(AHC)系统测试
- 使用光探测和测距系统(LIDARs)、运动参考单元(MRUs)等对海洋环境中使用的传感器进行第三方精度评估
- 对按比例缩小的救生艇进行动态跌落测试,用于改善感知系统,增强行业合作伙伴的竞争力,并提高疏散、逃生和救援行动中人员的安全性

“Qualisys提供的动作捕捉系统已经成为精确可靠测量的基础,这对我们满足客户的需求至关重要。”——运动实验室技术经理Witold Pawlus
无人机和触觉增强现实——爱立信
在2016年世界移动通信大会上,爱立信的首席执行官CEO现场演示了一个原型系统。其理念是创建用于控制无人机或其他设备的数字化引导系统,通过在现实世界的一种虚拟装置,进行远程身体感触。
这种被称为“触觉增强现实”的实践可以让人控制无人机,并执行徒手飞行几乎不可能完成的动作。例如,手动保持无人机相对于另一个移动物体的精确固定位置是非常困难的。同时控制无人机和附加在无人机上的另一个工具,如相机稳定器或机械臂,基本上是一个人不可能做到的。

该项目演示了如何使用无人机来检查一个正在旋转的发电风车叶片,并将一个虚拟磁铁放在叶片上,然后让无人机飞向叶片并吸附在磁铁上。与虚拟磁铁相连时,操控员可以让无人机自由飞行,而专注于控制摄像机。

因为虚拟磁铁可以与移动物体连接,所以比使用海拔计量表、俯拍相机和 GPS 等结合而成的技术效果更好。磁铁也可以做成有型物体,例如,一个无人机可以沿着飞行的轨道。虚拟物体还可以模仿许多其它物体、形状或材料。

“对于定位和跟踪,我们使用了Qualisys的5+动作捕捉系统,该系统也是此项目的杰出技术合作伙伴。没有他们,这个项目就不会实现。”——爱立信高级研究员Joakim Formo
破冰技术——AKER ARCTIC
芬兰阿克北极科技公司(AKER ARCTIC)已经建造世界上60%的破冰船,其中有许多北极或南极研究船,以及各种各样的货船和近海结构的新概念。除设计工作外,阿克北极还进行了数百次模型规模和全尺寸测试,并制作了数百份报告,研究如何在北极中操作和运输货物。制造一系列的冰船设计可供船东和造船厂使用。
AKER ARCTIC 和 QUALISYS
Aker Arctic在芬兰赫尔辛基有一个特殊的测试场地,这是唯一的私有冰模型测试场地。冰模型测试提供了关于运冰船和设备的性能和操作能力的关键信息。Aker Arctic公司使用4台Qualisys 3+摄像机跟踪模型的位置和运动,以便在冰模盆地的艰难环境条件下获得精确的测试结果。
利用Qualisys摄像机系统获取的6DOF数据,可以在模型上实时模拟GPS和陀螺罗经信号,以提供位置和高度参考。控制计算机使用这些信号来自动调整模型的推进,以达到预期目的。例如,在动态定位测试中,这是必不可少的。
系统配置
- 4个Qualisys 3+ IP67摄像机
- Qualisys Track Manager软件
- 牵引机

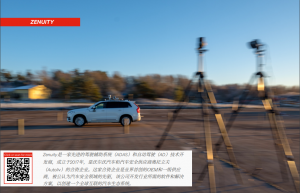
推动安全智能出行——ZENUITY
怀着让尽可能多的人使用安全智能移动的雄心,该公司致力于本地汽车的辅助技术。基于位置的服务需要定位系统,可以估计用户的位置。全球定位系统(GPS)通常用于导航、跟踪和公共安全。然而,在室内环境中,来自GPS卫星的信号受到阻碍,所提供覆盖范围具有局限性和结果不准确的问题。
因为光学动作捕捉技术能为室内车辆定位和自动驾驶提供解决方案,Zenuity配备了12台Qualisys 7+摄像机,以支持他们开发自动驾驶解决方案的项目。
动作捕捉系统安装在一个170平方米的圆形场地,用于室内的车辆定位。例如,通过追踪常规测试的车辆位置,开发人员可以使用收集的车辆位置和方位数据来确定车间距离和精确时间点以进行操控,并计算应用于自动化测试的算法。

Qualisys 7+的防护特性,可以在户外环境中工作,以进行各种场景下的测试。Qualisys系统的一个关键组件是它的开源实时软件开发工具包(RTSDK),可以兼容测试团队的自制软件应用程序。在测试早期阶段确定的算法可用于在测试轨道上执行自动操纵时实时控制车辆运动。有了这个功能,团队可以拥有更高程度自动化,从而将手工劳动最小化。

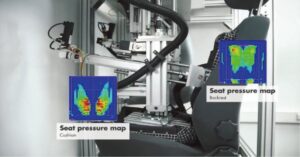
测试团队也使用Qualisys系统来追踪车辆内部的物体,从而洞察人体工程学设计和驾驶员的反应倾向。