自动驾驶等级(L0-L5)
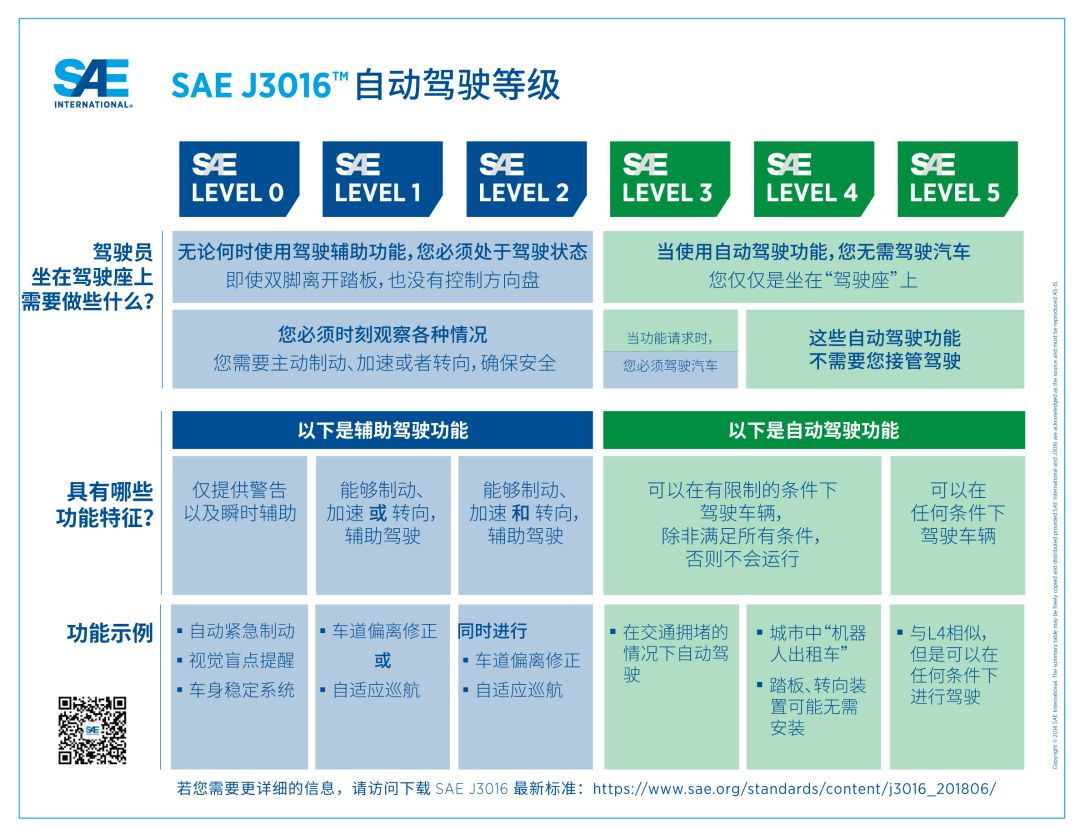
图1 SAE International J3016 ™“驾驶自动化等级” 标准可视化图表

图2 自动驾驶汽车穿过武汉鹦鹉洲长江大桥
首先是周密的周边环境感知,无论何种天气、路况下,自动驾驶系统都要能检测出道路特征,完成对周围环境的周密感知。其次就是要让自动驾驶汽车准确地判断它周边物体或周边车辆的预行为。预行为即指没有产生这个行为之前,下一个时刻周边车辆或移动物体的可能变化。
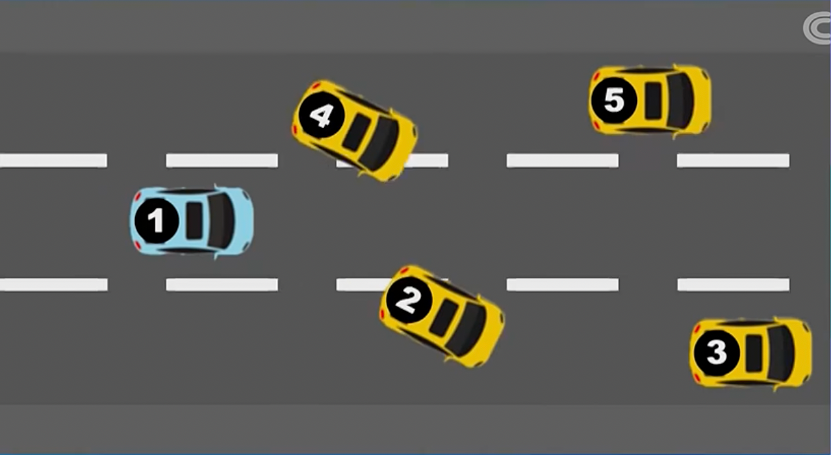
图3 蓝色为自动驾驶汽车,黄色为人类驾驶车,蓝色1号车需预测黄色车辆的可能路径
从次是建立一种人与自动驾驶汽车自然交互的环境。乘客到自动驾驶汽车里,他要能够用自己的语言和自动驾驶汽车进行交互。这种自然的交流不仅仅能够提供给乘客一种舒适的体验,它实际上也是一种安全的认证。自动驾驶汽车理解你去哪里,他用语言在回答,那么乘客就放心了。”
最后是网络安全的问题。郑南宁表示,自动驾驶车要通过云端更新地图以获取相关的数据,这会使其面临更大风险。“我们可以想象以后会出现这样一种恶意的行为,比如说黑客侵入的自动驾驶汽车中,它可以禁用自动驾驶汽车,也有可能在行驶过程中制造交通事故。

图4 黑客侵入的自动驾驶汽车
于是,对于自动驾驶发展路径的抉择,美国、中国、日本、德国等国家从各自国情出发,基于相关产业的发展情况与核心能力,整合各自的战略优势,将选择适合自身的发展道路。对于美国而言,人工智能领域全球领先,人才储备充足,基础科研实力强,美国的人工智能企业数量位居全球首位,遍布基础层、技术层和应用层,在自动驾驶领域的人工智能算法方面有较为深厚的技术积淀,保持一定的优势。对于中国而言, 4G和5G基站数量多,覆盖广,同时中国政府大力推行5G网络、物联网等新型基础设施建设,在道路的改造方面坚决推行 5G LTE-V2X技术标准,支持LTE-V2X向5G-V2X 平滑演进。这样一来,就衍生出了自动驾驶的两大方向:单车智能和车路协同。
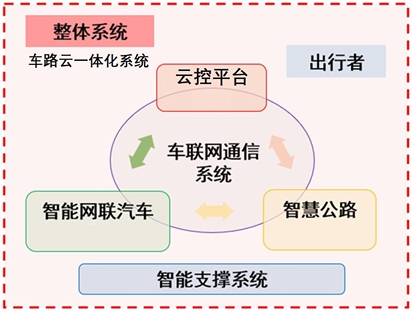
图5 车路云协同自动驾驶系统框架图
车路云协同自动驾驶是一个由低至高的发展历程。车路云协同自动驾驶系统 包括协同感知、协同决策、协同控制,如图6,按不同等级逐个实现突破,最终 实现一体化。该系统主要包括以下几个车路云协同发展等级:等级I,以协同感知为主,车路云协同感知,车车、车路、车云、路云等进行信息交互和共享,实现车辆与道路、云控平台的信息交互和共享;等级II,以协同决策为主, 在等级I基础上,又可协同完成数据融合、状态预测和行为决策;等级III, 以协同控制为主,在等级I和II基础上,协同完成感知、预测、决策和协同控制功能,车辆和道路实现全面协同,支持全天候、全路网、全光照的自动驾驶。且感知、决策、控制能力随等级的提升而逐步上升。
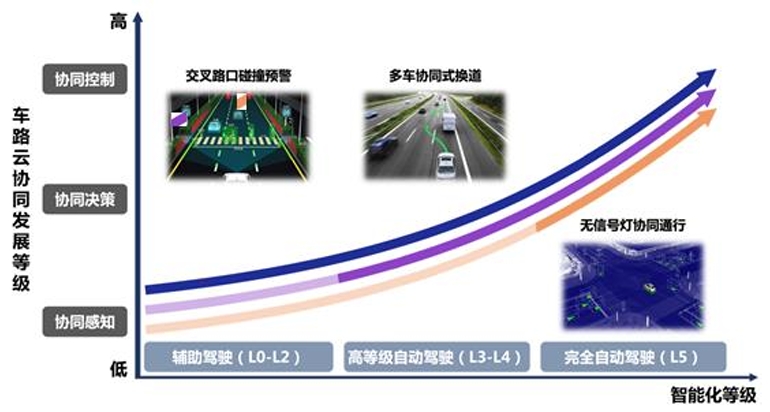
图6 车路云协同发展路线
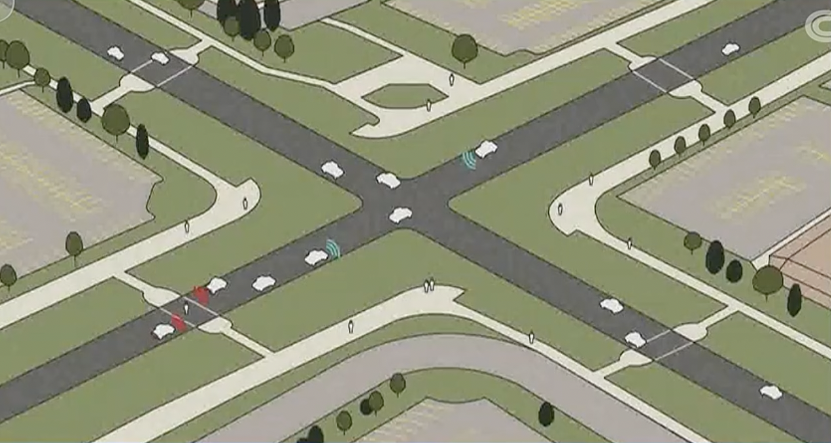
图7 原本的城市道路
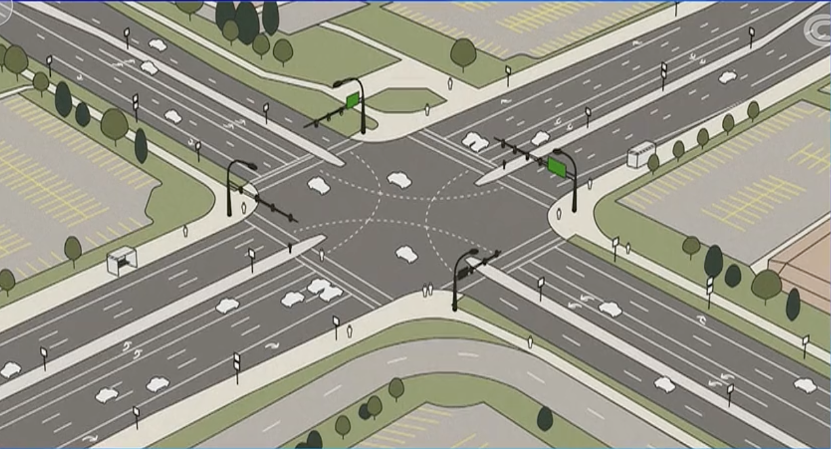
图8 完全适应自动驾驶车辆的城市道路

SIMLAB驾驶模拟器系列,是目前行业领先的驾驶模拟系统。SIMLAB汽车驾驶模拟系统是赢富仪器、科驰智能与德国ERGONEERS公司合作研发并制造的研究级汽车驾驶模拟系统,并搭配WIVW公司开发的SILAB驾驶模拟仿真软件,提供三自由度、六自由度以及带轨道的大型运动平台,也可以根据需求定制运动平台。



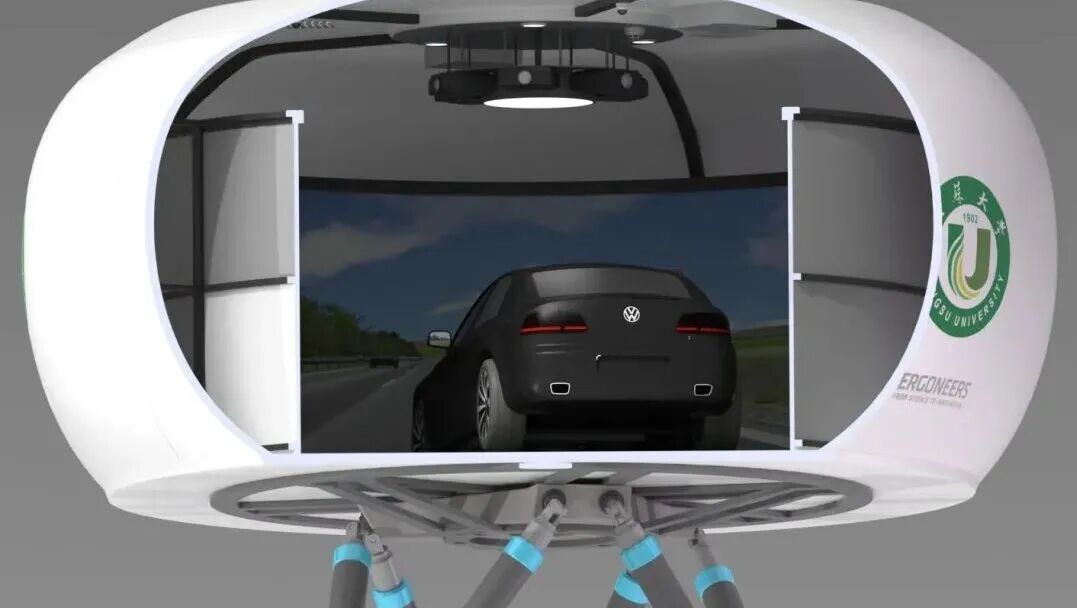

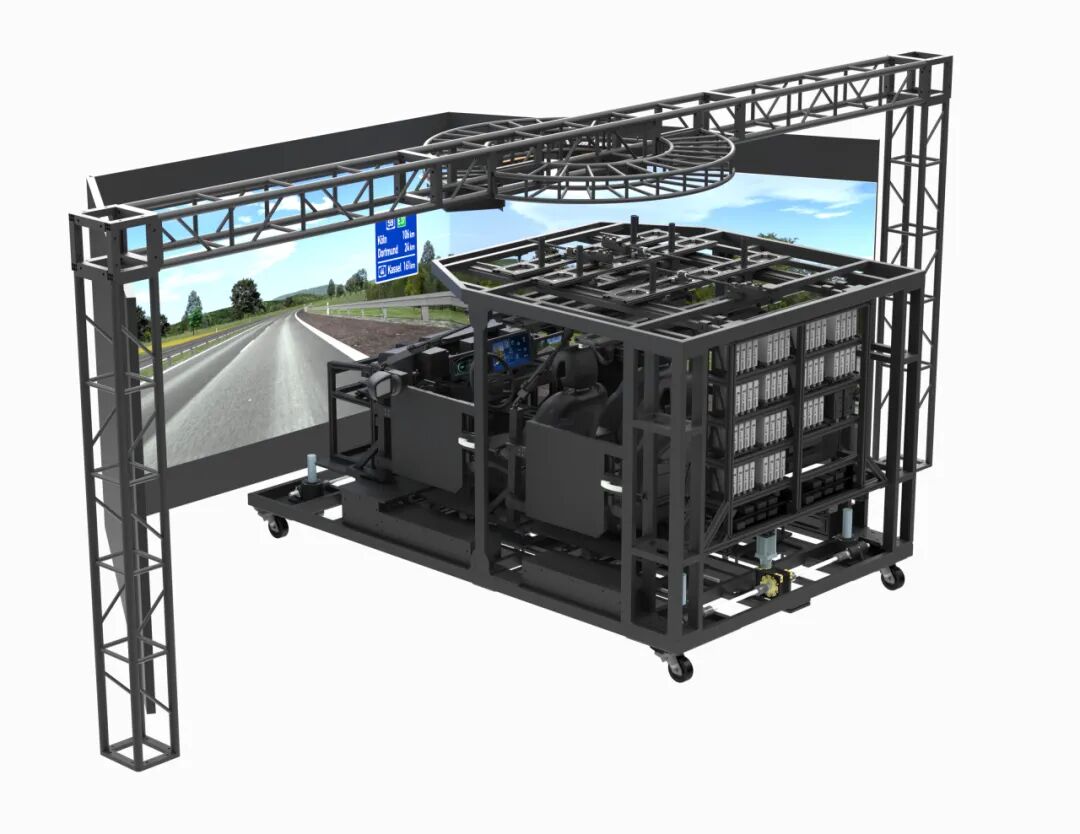

SILAB仿真模拟场景
2.科创板日报.张屹鹏.《高阶自动驾驶频迎利好:车路云一体化首批试点城市或月内出炉 、9大联合体入围智能网联汽车准入试点》
3.中国公路学会,中国汽车工程学会 ,《中国通信学会.车路协同自动驾驶系统 (车路云一体化系统)协同发展框架》.2023年1月